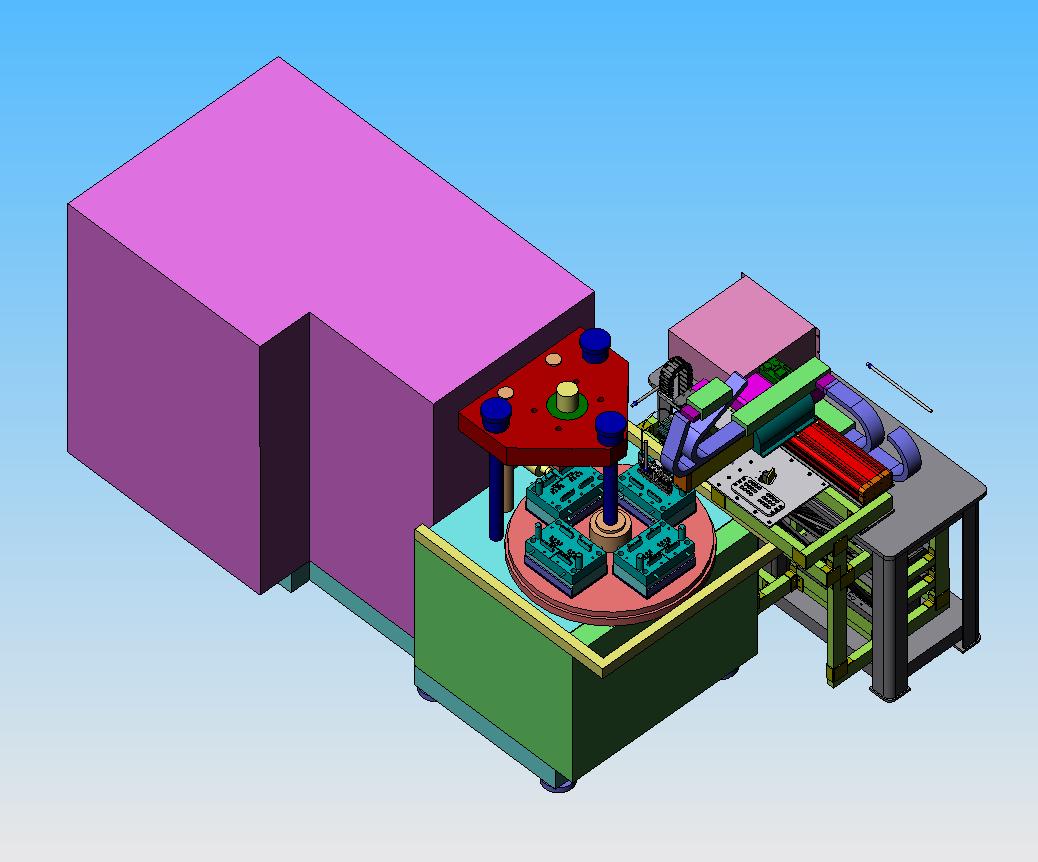
Develop a high speed robotic work cell
that unloads Air Bag Igniter Relays from an automated molding machine
and sorts them into accept/reject/audit bins based on machine vision
inspection of the wire lead length.
Solution:
Robotic Part Unload & Inspection System
Epson Linear Cartesian XYZ Robot moves a
custom gripper with eight retractable vacuum cups shaped to accept the
relays as they are pushed up by the mold's ejector pins.
Machine Vision Inspection System
strategically placed to see both terminal leads of each of eight
relays when individually positioned in front of a backlight panel.
Sorting chutes allow parts to be dropped
into one of 24 bins.
Gate Runner is removed with parts and
dropped in large waste bin.